公告:
产品列表
新闻资讯NEWS AND INFORMATION
桁架机械手的主要结构和技术分析
更新时间:2021-03-16 14:49:00 作者:丰宏机械 来源:www.zzfhjx.com
自从2020年新冠疫情爆发以来,口罩的需求量也在极速攀升。口罩作为阻挡有害的气体、气味、飞沫进出佩戴者口鼻的用具,被国内外的消费者一抢而空,口罩成为今年供不应求的卫生用品,口罩生产厂家也是加班生产,热火朝天,那么高质量的全自动口罩机对于厂家生产来说就显得非常重要了。
河南郑州,地处中原,在这个人口大省,口罩的需求量自然也是供不应求。郑州丰宏机械设备科技有限公司作为本地高科技企业,率先研发并投入市场的全自动口罩包装机也是颇得市场青睐。作为于郑州本地的口罩包装机生产厂家,丰宏科技经过潜心研究、不断测试打磨,其口罩包装机已经销往全国,乃至世界各地,并赢得了良好的口碑。.
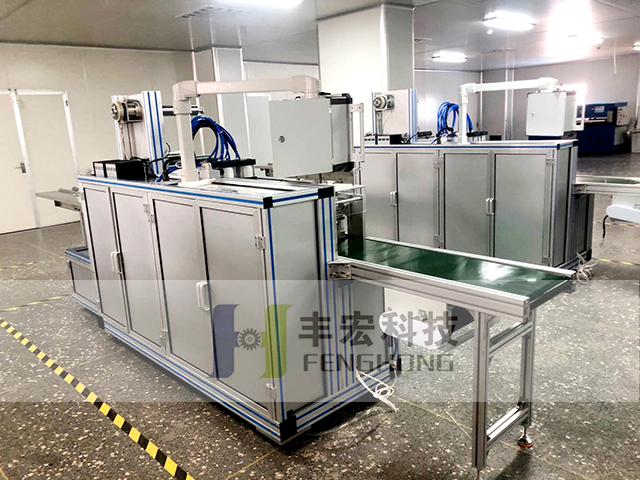 郑州丰宏科技生产的FH-ZKB3070多功能四边封口罩包装机是公司根据现阶段市场需求研发的一款多功能口罩包装机。该机型主要适用于医用外科口罩、KN95口罩、KN94口罩、医用纱布等产品。该机型采用四轴伺服驱动系统,PLC可编程智能控制能够实现自动打码、热压封袋、成品切断等自动化过程。
郑州丰宏科技生产的FH-ZKB3070多功能四边封口罩包装机是公司根据现阶段市场需求研发的一款多功能口罩包装机。该机型主要适用于医用外科口罩、KN95口罩、KN94口罩、医用纱布等产品。该机型采用四轴伺服驱动系统,PLC可编程智能控制能够实现自动打码、热压封袋、成品切断等自动化过程。
丰宏科技在全国更是有众多成功客户案例可供参观考察,欢迎朋友们来电咨询:15037117666。
河南郑州,地处中原,在这个人口大省,口罩的需求量自然也是供不应求。郑州丰宏机械设备科技有限公司作为本地高科技企业,率先研发并投入市场的全自动口罩包装机也是颇得市场青睐。作为于郑州本地的口罩包装机生产厂家,丰宏科技经过潜心研究、不断测试打磨,其口罩包装机已经销往全国,乃至世界各地,并赢得了良好的口碑。.
丰宏科技在全国更是有众多成功客户案例可供参观考察,欢迎朋友们来电咨询:15037117666。
上一篇:河南桁架机器人设备生产厂家
